


產品分類

山東合運電氣有限公司
手機:15588886921(同微信)
官網:m.ldrcw.com.cn
郵箱:2466458158@qq.com
派克變換
時間:2022-11-13 人氣: 來源:山東合運電氣有限公司
派克變換(也譯作帕克變換,英語:Park's Transformation),是目前分析同步電動機運行最常用的一種坐標變換,由美國工程師派克(R.H.Park)在1929年提出。派克變換將定子的a,b,c三相電流投影到隨著轉子旋轉的直軸(d軸),交軸(q軸)與垂直于dq平面的零軸(0軸)上去,從而實現了對定子電感矩陣的對角化,對同步電動機的運行分析起到了簡化作用。
定義
派克正變換:
{\displaystyle{\mathbf{i}}_{dq0}={\mathbf{P}}{\mathbf{i}}_{abc}={\frac{2}{3}}\left[{\begin{array}{*{20}c}{\cos\theta}&{\cos\left({\theta-120^{\circ}}\right)}&{\cos\left({\theta+120^{\circ}}\right)}\\{-\sin\theta}&{-\sin\left({\theta-120^{\circ}}\right)}&{-\sin\left({\theta+120^{\circ}}\right)}\\{\frac{1}{2}}&{\frac{1}{2}}&{\frac{1}{2}}\\\end{array}}\right]\left[{\begin{array}{*{20}c}{i_{a}}\\{i_{b}}\\{i_{c}}\\\end{array}}\right]}{\displaystyle{\mathbf{i}}_{dq0}={\mathbf{P}}{\mathbf{i}}_{abc}={\frac{2}{3}}\left[{\begin{array}{*{20}c}{\cos\theta}&{\cos\left({\theta-120^{\circ}}\right)}&{\cos\left({\theta+120^{\circ}}\right)}\\{-\sin\theta}&{-\sin\left({\theta-120^{\circ}}\right)}&{-\sin\left({\theta+120^{\circ}}\right)}\\{\frac{1}{2}}&{\frac{1}{2}}&{\frac{1}{2}}\\\end{array}}\right]\left[{\begin{array}{*{20}c}{i_{a}}\\{i_{b}}\\{i_{c}}\\\end{array}}\right]}
逆變換:
{\displaystyle{\mathbf{i}}_{abc}={\mathbf{P}}^{-1}{\mathbf{i}}_{dq0}=\left[{\begin{array}{*{20}c}{\cos\theta}&{-\sin\theta}&1\\{\cos\left({\theta-120^{\circ}}\right)}&{-\sin\left({\theta-120^{\circ}}\right)}&1\\{\cos\left({\theta+120^{\circ}}\right)}&{-\sin\left({\theta+120^{\circ}}\right)}&1\\\end{array}}\right]\left[{\begin{array}{*{20}c}{i_kmk00wm}\\{i_{q}}\\{i_{0}}\\\end{array}}\right]}{\displaystyle{\mathbf{i}}_{abc}={\mathbf{P}}^{-1}{\mathbf{i}}_{dq0}=\left[{\begin{array}{*{20}c}{\cos\theta}&{-\sin\theta}&1\\{\cos\left({\theta-120^{\circ}}\right)}&{-\sin\left({\theta-120^{\circ}}\right)}&1\\{\cos\left({\theta+120^{\circ}}\right)}&{-\sin\left({\theta+120^{\circ}}\right)}&1\\\end{array}}\right]\left[{\begin{array}{*{20}c}{i_kmk00wm}\\{i_{q}}\\{i_{0}}\\\end{array}}\right]}
派克變換也作用在定子電壓與定子繞組磁鏈上:{\displaystyle{\mathbf{u}}_{dq0}={\mathbf{P}}{\mathbf{u}}_{abc}}{\displaystyle{\mathbf{u}}_{dq0}={\mathbf{P}}{\mathbf{u}}_{abc}},{\displaystyle{\mathbf{\Psi}}_{dq0}={\mathbf{P}}{\mathbf{\Psi}}_{abc}}{\displaystyle{\mathbf{\Psi}}_{dq0}={\mathbf{P}}{\mathbf{\Psi}}_{abc}}
幾何解釋
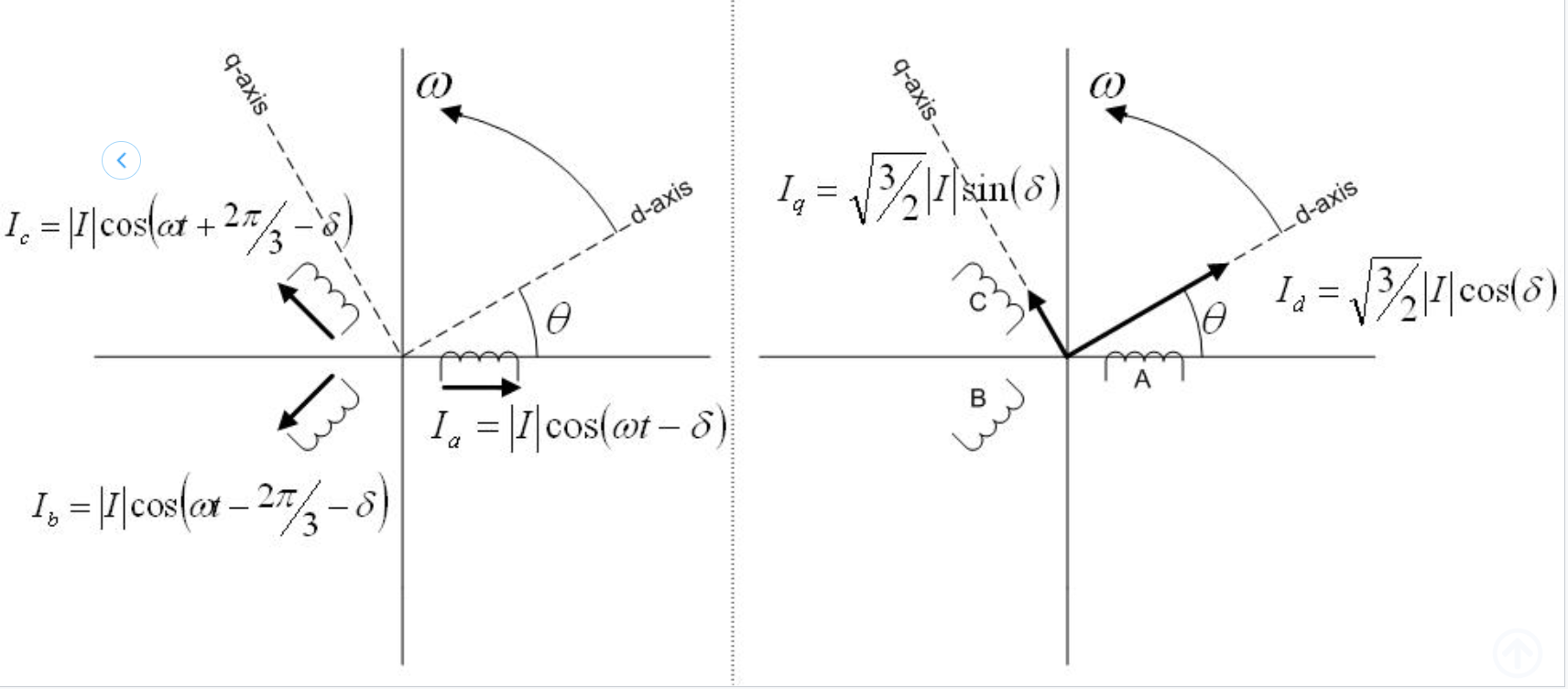
上圖描繪了派克變換的幾何意義,定子三相電流互成120度角,{\displaystyle\delta}\delta為定子電流落后于它們對應的相電壓的角度。直軸與交軸電流分別等于定子三相電流在d軸與q軸上的投影。(圖中的比例系數{\displaystyle{\sqrt{\frac{3}{2}}}}{\displaystyle{\sqrt{\frac{3}{2}}}}是由于圖中所采用的是正交形式的派克變換)d-q坐標系在空間中以角速度{\displaystyle\omega}\omega逆時針旋轉,故{\displaystyle\theta=\omega t}{\displaystyle\theta=\omega t}以d軸領先a相軸線的方向為正。當定子電流為三相對稱的正弦交流電時,{\displaystyle i_kmk00wm}{\displaystyle i_kmk00wm},{\displaystyle i_{q}}{\displaystyle i_{q}}為直流電流,{\displaystyle i_{0}=0}{\displaystyle i_{0}=0}。
用派克變換化簡同步發電機基本方程
變換后的磁鏈方程
磁鏈方程:
{\displaystyle\left[{\begin{array}{*{20}c}{{\mathbf{\Psi}}_{abc}}\\{{\mathbf{\Psi}}_{fDQ}}\\\end{array}}\right]=\left[{\begin{array}{*{20}c}{{\mathbf{L}}_{SS}}&{{\mathbf{L}}_{SR}}\\{{\mathbf{L}}_{RS}}&{{\mathbf{L}}_{RR}}\\\end{array}}\right]\left[{\begin{array}{*{20}c}{-{\mathbf{i}}_{abc}}\\{{\mathbf{i}}_{fDQ}}\\\end{array}}\right]}{\displaystyle\left[{\begin{array}{*{20}c}{{\mathbf{\Psi}}_{abc}}\\{{\mathbf{\Psi}}_{fDQ}}\\\end{array}}\right]=\left[{\begin{array}{*{20}c}{{\mathbf{L}}_{SS}}&{{\mathbf{L}}_{SR}}\\{{\mathbf{L}}_{RS}}&{{\mathbf{L}}_{RR}}\\\end{array}}\right]\left[{\begin{array}{*{20}c}{-{\mathbf{i}}_{abc}}\\{{\mathbf{i}}_{fDQ}}\\\end{array}}\right]}
上式中的電感系數矩陣{\displaystyle{{\mathbf{L}}_{SS}},{{\mathbf{L}}_{SR}},{{\mathbf{L}}_{RS}},{{\mathbf{L}}_{RR}}}{\displaystyle{{\mathbf{L}}_{SS}},{{\mathbf{L}}_{SR}},{{\mathbf{L}}_{RS}},{{\mathbf{L}}_{RR}}}事實上都含有隨時間變化的角度參數[1],使得方程求解困難。
現對等式兩邊同時左乘{\displaystyle\left[{\begin{array}{*{20}c}{\mathbf{P}}&{}\\{}&{\mathbf{U}}\\\end{array}}\right]}{\displaystyle\left[{\begin{array}{*{20}c}{\mathbf{P}}&{}\\{}&{\mathbf{U}}\\\end{array}}\right]},其中{\displaystyle{\mathbf{U}}}{\displaystyle{\mathbf{U}}}為三階單位矩陣。方程化為:
{\displaystyle\left[{\begin{array}{*{20}c}{{\mathbf{\Psi}}_{dq0}}\\{{\mathbf{\Psi}}_{fDQ}}\\\end{array}}\right]=\left[{\begin{array}{*{20}c}{\mathbf{P}}&{}\\{}&{\mathbf{U}}\\\end{array}}\right]\left[{\begin{array}{*{20}c}{{\mathbf{L}}_{SS}}&{{\mathbf{L}}_{SR}}\\{{\mathbf{L}}_{RS}}&{{\mathbf{L}}_{RR}}\\\end{array}}\right]\left[{\begin{array}{*{20}c}{{\mathbf{P}}^{-1}}&{}\\{}&{\mathbf{U}}\\\end{array}}\right]\left[{\begin{array}{*{20}c}{-{\mathbf{i}}_{abc}}\\{{\mathbf{i}}_{fDQ}}\\\end{array}}\right]}{\displaystyle\left[{\begin{array}{*{20}c}{{\mathbf{\Psi}}_{dq0}}\\{{\mathbf{\Psi}}_{fDQ}}\\\end{array}}\right]=\left[{\begin{array}{*{20}c}{\mathbf{P}}&{}\\{}&{\mathbf{U}}\\\end{array}}\right]\left[{\begin{array}{*{20}c}{{\mathbf{L}}_{SS}}&{{\mathbf{L}}_{SR}}\\{{\mathbf{L}}_{RS}}&{{\mathbf{L}}_{RR}}\\\end{array}}\right]\left[{\begin{array}{*{20}c}{{\mathbf{P}}^{-1}}&{}\\{}&{\mathbf{U}}\\\end{array}}\right]\left[{\begin{array}{*{20}c}{-{\mathbf{i}}_{abc}}\\{{\mathbf{i}}_{fDQ}}\\\end{array}}\right]}
{\displaystyle\left[{\begin{array}{*{20}c}{{\mathbf{\Psi}}_{dq0}}\\{{\mathbf{\Psi}}_{fDQ}}\\\end{array}}\right]=\left[{\begin{array}{*{20}c}{{\mathbf{PL}}_{SS}{\mathbf{P}}^{-1}}&{{\mathbf{PL}}_{SR}}\\{{\mathbf{L}}_{RS}{\mathbf{P}}^{-1}}&{{\mathbf{L}}_{RR}}\\\end{array}}\right]\left[{\begin{array}{*{20}c}{-{\mathbf{i}}_{dq0}}\\{{\mathbf{i}}_{fDQ}}\\\end{array}}\right]}{\displaystyle\left[{\begin{array}{*{20}c}{{\mathbf{\Psi}}_{dq0}}\\{{\mathbf{\Psi}}_{fDQ}}\\\end{array}}\right]=\left[{\begin{array}{*{20}c}{{\mathbf{PL}}_{SS}{\mathbf{P}}^{-1}}&{{\mathbf{PL}}_{SR}}\\{{\mathbf{L}}_{RS}{\mathbf{P}}^{-1}}&{{\mathbf{L}}_{RR}}\\\end{array}}\right]\left[{\begin{array}{*{20}c}{-{\mathbf{i}}_{dq0}}\\{{\mathbf{i}}_{fDQ}}\\\end{array}}\right]}
其中{\displaystyle{\mathbf{PL}}_{SS}{\mathbf{P}}^{-1}=\left[{\begin{array}{*{20}c}{L_kmk00wm}&{}&{}\\{}&{L_{q}}&{}\\{}&{}&{L_{0}}\\\end{array}}\right]\triangleq{\mathbf{L}}_{dq0}}{\displaystyle{\mathbf{PL}}_{SS}{\mathbf{P}}^{-1}=\left[{\begin{array}{*{20}c}{L_kmk00wm}&{}&{}\\{}&{L_{q}}&{}\\{}&{}&{L_{0}}\\\end{array}}\right]\triangleq{\mathbf{L}}_{dq0}}。
①變換后的電感系數都變為常數,可以假想dd繞組,qq繞組是固定在轉子上的,相對轉子靜止。
②派克變換陣對定子自感矩陣{\displaystyle{\mathbf{L}}_{SS}}{\displaystyle{\mathbf{L}}_{SS}}起到了對角化的作用,并消去了其中的角度變量。{\displaystyle{L_kmk00wm},{L_{q}},{L_{0}}}{\displaystyle{L_kmk00wm},{L_{q}},{L_{0}}}為其特征根。
③變換后定子和轉子間的互感系數不對稱,這是由于派克變換的矩陣不是正交矩陣。
④{\displaystyle{L_kmk00wm}}{\displaystyle{L_kmk00wm}}為直軸同步電感系數,其值相當于當勵磁繞組開路,定子合成磁勢產生單純直軸磁場時,任意一相定子繞組的自感系數。
變換后的電壓方程
電壓方程:
{\displaystyle\left[{\begin{array}{*{20}c}{{\mathbf{U}}_{abc}}\\{{\mathbf{U}}_{fDQ}}\\\end{array}}\right]=\left[{\begin{array}{*{20}c}{{\mathbf{r}}_{S}}&{}\\{}&{{\mathbf{r}}_{R}}\\\end{array}}\right]\left[{\begin{array}{*{20}c}{-{\mathbf{i}}_{abc}}\\{{\mathbf{i}}_{fDQ}}\\\end{array}}\right]+\left[{\begin{array}{*{20}c}{{\mathbf{\dot{\Psi}}}_{abc}}\\{{\mathbf{\dot{\Psi}}}_{fDQ}}\\\end{array}}\right]}{\displaystyle\left[{\begin{array}{*{20}c}{{\mathbf{U}}_{abc}}\\{{\mathbf{U}}_{fDQ}}\\\end{array}}\right]=\left[{\begin{array}{*{20}c}{{\mathbf{r}}_{S}}&{}\\{}&{{\mathbf{r}}_{R}}\\\end{array}}\right]\left[{\begin{array}{*{20}c}{-{\mathbf{i}}_{abc}}\\{{\mathbf{i}}_{fDQ}}\\\end{array}}\right]+\left[{\begin{array}{*{20}c}{{\mathbf{\dot{\Psi}}}_{abc}}\\{{\mathbf{\dot{\Psi}}}_{fDQ}}\\\end{array}}\right]}
現對等式兩邊同時左乘{\displaystyle\left[{\begin{array}{*{20}c}{\mathbf{P}}&{}\\{}&{\mathbf{U}}\\\end{array}}\right]}{\displaystyle\left[{\begin{array}{*{20}c}{\mathbf{P}}&{}\\{}&{\mathbf{U}}\\\end{array}}\right]},其中{\displaystyle{\mathbf{U}}}{\displaystyle{\mathbf{U}}}為三階單位矩陣。方程化為:
{\displaystyle\left[{\begin{array}{*{20}c}{{\mathbf{U}}_{dq0}}\\{{\mathbf{U}}_{fDQ}}\\\end{array}}\right]=\left[{\begin{array}{*{20}c}{{\mathbf{r}}_{S}}&{}\\{}&{{\mathbf{r}}_{R}}\\\end{array}}\right]\left[{\begin{array}{*{20}c}{-{\mathbf{i}}_{dq0}}\\{{\mathbf{i}}_{fDQ}}\\\end{array}}\right]+\left[{\begin{array}{*{20}c}{{\mathbf{P{\dot{\Psi}}}}_{abc}}\\{{\mathbf{\dot{\Psi}}}_{fDQ}}\\\end{array}}\right]}{\displaystyle\left[{\begin{array}{*{20}c}{{\mathbf{U}}_{dq0}}\\{{\mathbf{U}}_{fDQ}}\\\end{array}}\right]=\left[{\begin{array}{*{20}c}{{\mathbf{r}}_{S}}&{}\\{}&{{\mathbf{r}}_{R}}\\\end{array}}\right]\left[{\begin{array}{*{20}c}{-{\mathbf{i}}_{dq0}}\\{{\mathbf{i}}_{fDQ}}\\\end{array}}\right]+\left[{\begin{array}{*{20}c}{{\mathbf{P{\dot{\Psi}}}}_{abc}}\\{{\mathbf{\dot{\Psi}}}_{fDQ}}\\\end{array}}\right]}
由{\displaystyle{\mathbf{\Psi}}_{dq0}={\mathbf{P\Psi}}_{abc}}{\displaystyle{\mathbf{\Psi}}_{dq0}={\mathbf{P\Psi}}_{abc}},
對兩邊求導,得{\displaystyle{\mathbf{\dot{\Psi}}}_{dq0}={\mathbf{{\dot{P}}\Psi}}_{abc}+{\mathbf{P{\dot{\Psi}}}}_{abc}}{\displaystyle{\mathbf{\dot{\Psi}}}_{dq0}={\mathbf{{\dot{P}}\Psi}}_{abc}+{\mathbf{P{\dot{\Psi}}}}_{abc}},
所以{\displaystyle{\mathbf{P{\dot{\Psi}}}}_{abc}={\mathbf{\dot{\Psi}}}_{dq0}-{\mathbf{{\dot{P}}\Psi}}_{abc}={\mathbf{\dot{\Psi}}}_{dq0}-{\mathbf{{\dot{P}}P}}^{-1}{\mathbf{\Psi}}_{dq0}}{\displaystyle{\mathbf{P{\dot{\Psi}}}}_{abc}={\mathbf{\dot{\Psi}}}_{dq0}-{\mathbf{{\dot{P}}\Psi}}_{abc}={\mathbf{\dot{\Psi}}}_{dq0}-{\mathbf{{\dot{P}}P}}^{-1}{\mathbf{\Psi}}_{dq0}}
其中{\displaystyle{\mathbf{{\dot{P}}P}}^{-1}=\left[{\begin{array}{*{20}c}{}&\omega&{}\\{-\omega}&{}&{}\\{}&{}&{}\\\end{array}}\right]}{\displaystyle{\mathbf{{\dot{P}}P}}^{-1}=\left[{\begin{array}{*{20}c}{}&\omega&{}\\{-\omega}&{}&{}\\{}&{}&{}\\\end{array}}\right]},令{\displaystyle{\mathbf{S}}={\mathbf{{\dot{P}}P}}^{-1}{\mathbf{\Psi}}_{dq0}=\left[{\begin{array}{*{20}c}{}&\omega&{}\\{-\omega}&{}&{}\\{}&{}&{}\\\end{array}}\right]\left[{\begin{array}{*{20}c}{\Phi _kmk00wm}\\{\Phi _{q}}\\{\Phi _{0}}\\\end{array}}\right]=\left[{\begin{array}{*{20}c}{\omega\Psi _{q}}\\{-\omega\Psi _kmk00wm}\\{}\\\end{array}}\right]}{\displaystyle{\mathbf{S}}={\mathbf{{\dot{P}}P}}^{-1}{\mathbf{\Psi}}_{dq0}=\left[{\begin{array}{*{20}c}{}&\omega&{}\\{-\omega}&{}&{}\\{}&{}&{}\\\end{array}}\right]\left[{\begin{array}{*{20}c}{\Phi _kmk00wm}\\{\Phi _{q}}\\{\Phi _{0}}\\\end{array}}\right]=\left[{\begin{array}{*{20}c}{\omega\Psi _{q}}\\{-\omega\Psi _kmk00wm}\\{}\\\end{array}}\right]}
于是有{\displaystyle\left[{\begin{array}{*{20}c}{{\mathbf{U}}_{dq0}}\\{{\mathbf{U}}_{fDQ}}\\\end{array}}\right]=\left[{\begin{array}{*{20}c}{{\mathbf{r}}_{S}}&{}\\{}&{{\mathbf{r}}_{R}}\\\end{array}}\right]\left[{\begin{array}{*{20}c}{-{\mathbf{i}}_{dq0}}\\{{\mathbf{i}}_{fDQ}}\\\end{array}}\right]+\left[{\begin{array}{*{20}c}{{\mathbf{\dot{\Psi}}}_{dq0}}\\{{\mathbf{\dot{\Psi}}}_{fDQ}}\\\end{array}}\right]-\left[{\begin{array}{*{20}c}{\mathbf{S}}\\{}\\\end{array}}\right]}{\displaystyle\left[{\begin{array}{*{20}c}{{\mathbf{U}}_{dq0}}\\{{\mathbf{U}}_{fDQ}}\\\end{array}}\right]=\left[{\begin{array}{*{20}c}{{\mathbf{r}}_{S}}&{}\\{}&{{\mathbf{r}}_{R}}\\\end{array}}\right]\left[{\begin{array}{*{20}c}{-{\mathbf{i}}_{dq0}}\\{{\mathbf{i}}_{fDQ}}\\\end{array}}\right]+\left[{\begin{array}{*{20}c}{{\mathbf{\dot{\Psi}}}_{dq0}}\\{{\mathbf{\dot{\Psi}}}_{fDQ}}\\\end{array}}\right]-\left[{\begin{array}{*{20}c}{\mathbf{S}}\\{}\\\end{array}}\right]}
上式右邊第一項為繞組電阻的壓降,第二項為變壓器電勢,第三項為發電機電勢或旋轉電勢。
關于派克變換,小編為大家就分享這些。歡迎聯系我們合運電氣有限公司,以獲取更多相關知識。







 魯公網安備 37010502001687號
魯公網安備 37010502001687號


